mindmap
root((Deep Learning</br> CS636))
Graph Neural Networks
Graphs convolutional networks
Convolutional Neural Network
Transformers
ViT
Self Supervised Learning
Contrastive Learning
CLIP
ImageBind
Generative models
Normalising Flows
Generative Adversarial Networks
Diffusion Models
Variational AutoEncoder
Generative Models
Maynooth University Maths & Stats Colloquias

2026-03-11
Introduction
Supervised Learning: with dataset \(\left\lbrace \left(\color{blue}{\mathbf{x}^{(i)}},\color{red}{\mathbf{y}^{(i)}}\right)\right\rbrace_{i=1,\cdots,N}\) having \(N\) example pairs, find best parameter \(\theta\) and hyperparameters \(\mathcal{H}\) to tune the machine \[ \mathcal{M}_{\theta,\mathcal{H}}(\color{blue}{\mathbf{x}}) = \hat{\mathbf{y}} \] by
estimating the parameter \(\hat{\theta}\) minimizing a loss e.g.: \[ \mathbb{E}\lbrack\mathcal{L}(\hat{\mathbf{y}},\mathbf{y}) \rbrack \simeq \frac{1}{N} \sum_{i=1}^N \mathcal{L}(\hat{\mathbf{y}}^{(i)},\color{red}{\mathbf{y}^{(i)}}) \]
choosing best hyperparameters \(\mathcal{H}\)
Introduction
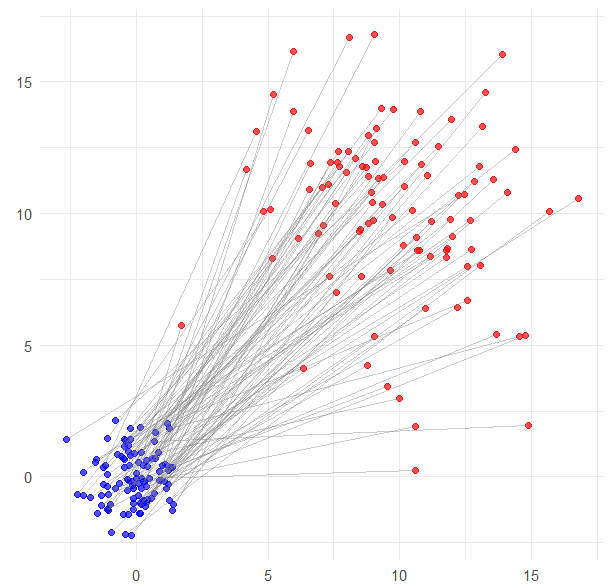
Generative (machine) Learning: with dataset \(\left\lbrace \mathbf{x}^{(i)}\right\rbrace_{i=1,\cdots,N}\), create a pair of datasets
\[ \left( \color{blue}{\left\lbrace \mathbf{z}^{(j)}\right\rbrace_{j=1,\cdots,N}} ; \color{red}{\left\lbrace \mathbf{x}^{(i)}\right\rbrace_{i=1,\cdots,N}}\right) \]
with \(\mathbf{z} \sim p_{\mathbf{z}}(\mathbf{z})\) a simple distribution easy to sample from (e.g. Gaussian).
The generative machine is computing: \[ \mathcal{M}_{\theta,\mathcal{H}}(\mathbf{z})=\hat{\mathbf{x}} \] The parameter \(\theta\) is tuned to minimise a divergence between the distribution of \(\hat{\mathbf{x}}\sim p_{\hat{\mathbf{x}}}(\hat{\mathbf{x}})\) and the true distribution of \(\mathbf{x}\sim p_{\mathbf{x}}(\mathbf{x})\).
1D Case
Applications:
Histogram equalization: if \(z\sim\mathcal{U}([0,1])\), then \(f(x)=P_x(x)\) maps an intensity pixel \(x\in [0;1]\) to \(f(x)=z\) that has a uniform distribution (improve contrast).
Flicker removal: with \(z\) pixel intensity of a reference frame, and \(x\) intensity pixel in frame at time \(t\) can be corrected with \(f(x)\).

Iterative Distribution Transfer (IDT)
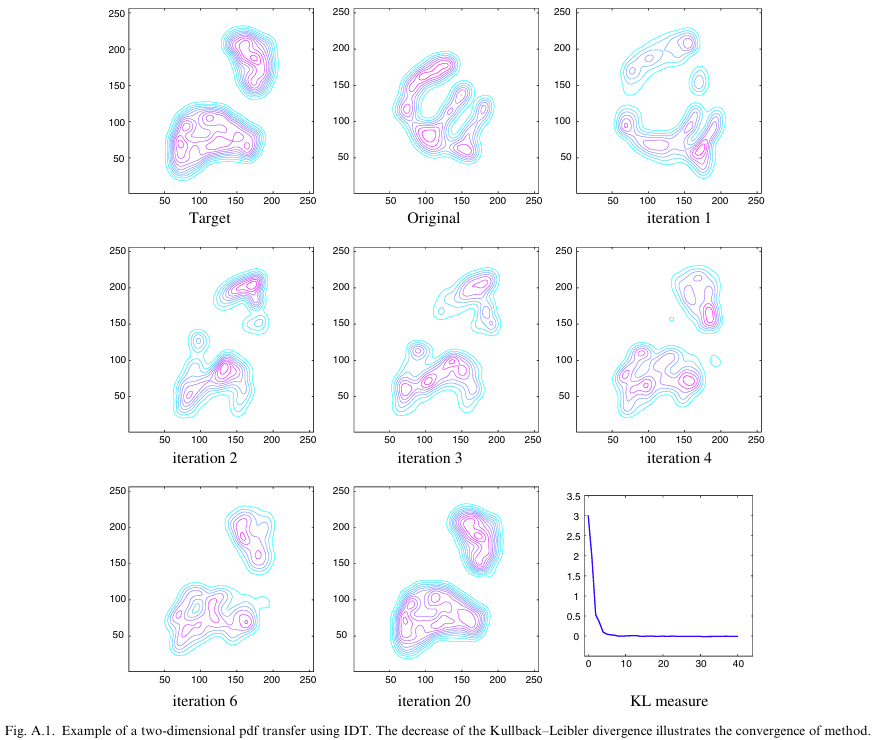
With \(\mathbf{x},\mathbf{z} \in\mathbb{R}^d\) (\(d=2\)) :
- \(p_{\mathbf{x}}\)
originalp.d.f. - \(p_{\mathbf{z}}\)
targetp.d.f.
- project data along several random directions and compute the 1D solution in each direction.
- the 1D solution provides a \(\delta^u_{\mathbf{x}}\) to move datum \(\mathbf{x}\) in that direction \(\mathbf{u}\). Each datum \(\mathbf{x}\) can be moved \(\mathbf{x}\leftarrow \mathbf{x}+\sum_{u}\delta^u_{\mathbf{x}} \mathbf{u}\)
- This results in a new distribution \(p_x^{(1)}\) shown as
iteration 1
Colour transfer
| Input reference | Target Palette | |

|

|
Colour transfer
| IDT (Pitie, Kokaram, and Dahyot 2007) 💻 | SWD (Bonneel et al. 2014) 💻 | L2 Divergence (Grogan and Dahyot 2019) 💻 |

|

|

|

|
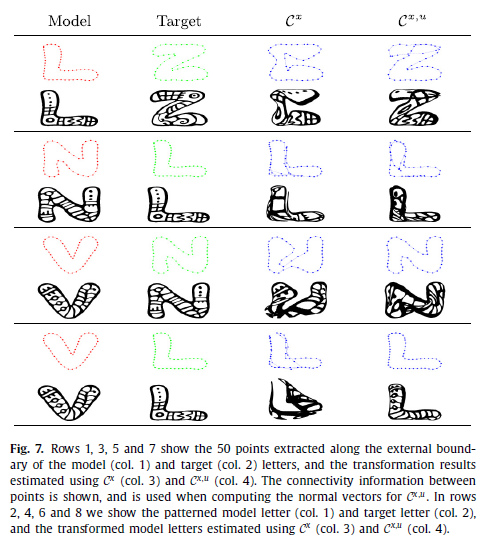
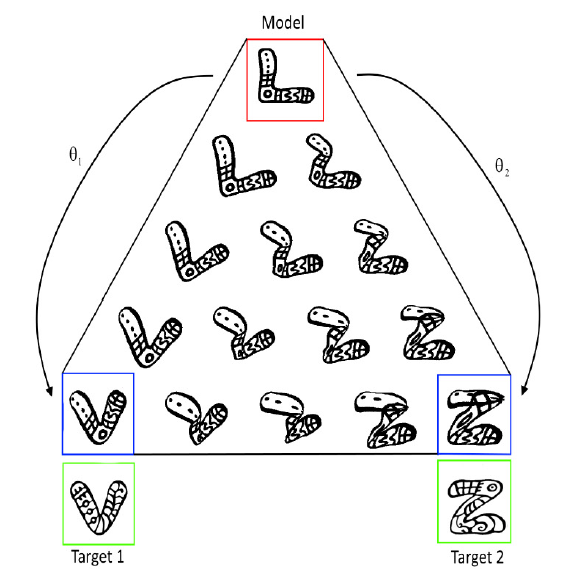
Shape transfer

Shape transfer
Normalizing Flows

|

|

|

|

|

|
| \(\mathbf{z}^{(0)} \sim \mathcal{N}(0,\mathrm{I})\) | \(\mathbf{z}^{(1)}\) | \(\mathbf{z}^{(2)}\) | \(\mathbf{z}^{(3)}\) | \(\mathbf{z}^{(4)}\) | Dataset \(\lbrace \mathbf{x}^{(i)} \rbrace\) |
| \(\left\lbrack\begin{array}{c} \color{green}{z_1^{(0)}}\\ z_2^{(0)} \end{array}\right\rbrack\) | \(\left\lbrack\begin{array}{c} \color{green}{z_1^{(0)}}\\ \color{blue}{z_2^{(1)}} \end{array}\right\rbrack\) | \(\left\lbrack\begin{array}{c} \color{red}{z_1^{(2)}}\\ \color{blue}{z_2^{(1)}} \end{array}\right\rbrack\) | \(\left\lbrack\begin{array}{c} \color{red}{z_1^{(2)}}\\ \color{brown}{z_2^{(3)}} \end{array}\right\rbrack\) | \(\left\lbrack\begin{array}{c} z_1^{(4)}\\ \color{brown}{z_2^{(3)}} \end{array}\right\rbrack\) |
Only part of the tensor is updated at each step whereas the other part is copied. The coordinate that changes is updated by a linear transformation e.g. \(z_2^{(1)}=\alpha\ z_2^{(0)}+\beta\)
such that \(\alpha=\exp(a(z_1^{(0)}, \theta_a))\) and \(\beta=b(z_1^{(0)},\theta_b)\) with \((a,b)\) learnable neural networks using \(z_1^{(0)}\) as input (the coordinate that remains the same). This transformation is invertible at every step!
Normalizing Flows

Other sources
Optimal Transport in Learning, Control, and Dynamical Systems, ICML 2023 tutorial
Generative Modeling via Drifting (Arxiv 2026, Deng et al. 2026)

References
Baptista, Anthony, Alessandro Barp, Tapabrata Chakraborti, Chris Harbron, Ben D. MacArthur, and Christopher R. S. Banerji. 2024. “Deep Learning as Ricci Flow.” Scientific Reports 14 (1). https://doi.org/10.1038/s41598-024-74045-9.
Bishop, Christopher M., and Hugh Bishop. 2024. Deep Learning: Foundations and Concepts. Springer International Publishing. https://doi.org/10.1007/978-3-031-45468-4.
Bonneel, Nicolas, Julien Rabin, Gabriel Peyré, and Hanspeter Pfister. 2014. “Sliced and Radon Wasserstein Barycenters of Measures.” Journal of Mathematical Imaging and Vision 51 (1): 22–45. https://doi.org/10.1007/s10851-014-0506-3.
Boss, Mark, Andreas Engelhardt, Simon Donné, and Varun Jampani. 2025. “ReSWD: ReSTIR’d, Not Shaken. Combining Reservoir Sampling and Sliced Wasserstein Distance for Variance Reduction.” https://arxiv.org/abs/2510.01061.
Deng, Mingyang, He Li, Tianhong Li, Yilun Du, and Kaiming He. 2026. “Generative Modeling via Drifting.” https://arxiv.org/abs/2602.04770.
Gagneux, Anne, Ségolène Martin, Rémi Emonet, Quentin Bertrand, and Mathurin Massias. 2025. “A Visual Dive into Conditional Flow Matching.” In ICLR Blogposts 2025. https://iclr-blogposts.github.io/2025/blog/conditional-flow-matching/.
Grogan, Mairead, and Rozenn Dahyot. 2018. “Shape Registration with Directional Data.” Pattern Recognition 79: 452–66. https://doi.org/10.1016/j.patcog.2018.02.021.
———. 2019. “L2 Divergence for Robust Colour Transfer.” Computer Vision and Image Understanding. https://doi.org/10.1016/j.cviu.2019.02.002.
Naranjo, V., and A. Albiol. 2000. “Flicker Reduction in Old Films.” In Proceedings 2000 International Conference on Image Processing (Cat. No.00CH37101), 2:657–659 vol.2. https://doi.org/10.1109/ICIP.2000.899794.
Pitie, F., R. Dahyot, F. Kelly, and A. Kokaram. 2004. “A New Robust Technique for Stabilizing Brightness Fluctuations in Image Sequences.” In Statistical Methods in Video Processing, edited by Dorin Comaniciu, Rudolf Mester, Kenichi Kanatani, and David Suter, 153–64. Berlin, Heidelberg: Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-540-30212-4{\_}14.
Pitie, F., A. C. Kokaram, and R. Dahyot. 2005. “N-Dimensional Probability Density Function Transfer and Its Application to Color Transfer.” In Tenth IEEE International Conference on Computer Vision (ICCV’05) Volume 1, 2:1434–39. https://doi.org/10.1109/ICCV.2005.166.
———. 2007. “Automated Colour Grading Using Colour Distribution Transfer.” Computer Vision and Image Understanding 107 (1): 123–37. https://doi.org/10.1016/j.cviu.2006.11.011.
